輔助駕駛不只會“開”,還要會“補能”

來哥駕道 | 01-21
 22091
22091
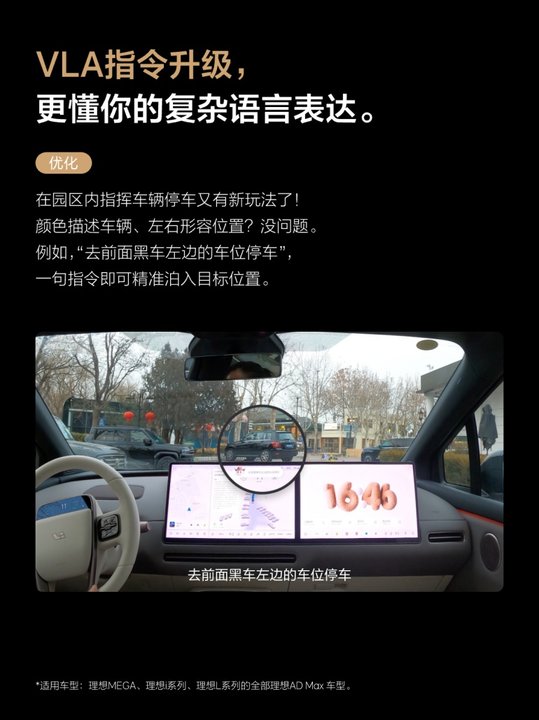
——理想OTA 8.2:VLA充電打通智能出行的最后100米
當行業還在反復討論城區NOA“像不像人”時,理想汽車在OTA 8.2中,把一個被長期忽略、卻極其高頻的真實痛點拉進了輔助駕駛體系——充電的最后100米。這是一次方向選擇:讓智能駕駛從“路上好用”,走向“生活中實用”。

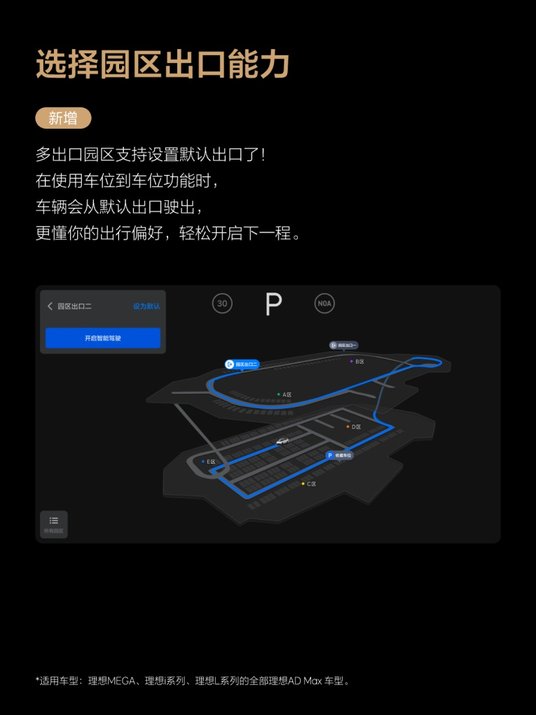
在OTA 8.2中,理想上線了VLA充電功能。用戶語音或導航前往理想5C超充站后,系統會提前分配并鎖定車位,車輛在NOA狀態下直達充電位,自動完成降地鎖、泊入并打開充電口。整個流程中,用戶只需最后插槍,補能體驗被壓縮成一次連續、確定的動作鏈。
這個“最后100米”之所以重要,是因為它正好卡在當前新能源體驗最割裂的位置。路上,智能駕駛已經相對成熟。但進站找樁、倒車對位、反復修正,依然高度依賴人工。不少品牌做了自動泊車,也有人嘗試駛入充電位,但成功率、穩定性和資源協同始終難以讓用戶真正放手。

理想VLA充電的不同,并不在于多了一段自動泊車,而在于它把“充電”當作輔助駕駛任務的自然延伸。車、樁、站、云形成統一體系,先鎖資源,再執行動作,避免“到了再看運氣”。這讓補能從多個功能拼接,變成了一次完整、可復制的體驗閉環。

從技術底層看,VLA司機大模型通過行為強化學習,提升了低速、窄空間下的橫縱控制能力,讓車輛在充電站這種復雜環境中依然保持絲滑和確定性。這種能力直接決定用戶是否敢在日常高頻場景中持續使用。
放在整個行業橫向對比,目前具備近似能力的方案,大多要么站端不協同,要么流程中斷頻繁,要么覆蓋范圍有限。理想這次至少在自有超充體系內,把這件事跑通并規模化落地,1400多座城市超充站同步支持,本身就是一道不低的門檻。
如果把智能駕駛的發展劃分階段,從“能不能跑”,到“跑得好不好”,再到“有沒有真正融入用車生活”,VLA充電顯然已經進入第三階段。它解決的不是技術有沒有,而是用戶每天是否愿意用、是否覺得省心。
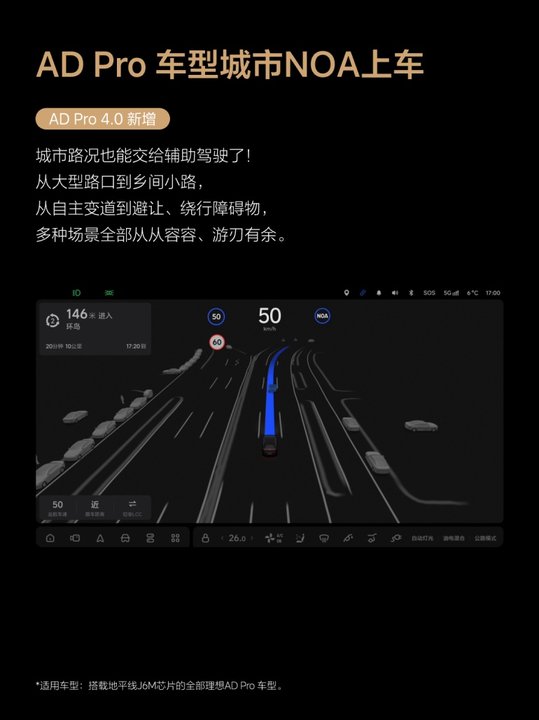
OTA 8.2里,理想還同步強化了城區舒適性、補齊了AD Pro的城市NOA,并在座艙和補能細節上持續打磨。但如果只選一個最能代表方向感的功能,VLA充電無疑是那個分水嶺式的存在。當智能駕駛開始接管“終點之后”的事情,出行體驗才算真正閉環。看起來只是最后100米,但行業都清楚,最難、也最值錢的,往往正是這100米。